
OCR Specification focus:
‘Distinguish between free oscillations and forced oscillations driven by an external periodic force.’
In oscillatory systems, motion can occur naturally or under external influence. Understanding the difference between free oscillations and forced oscillations is essential to interpreting real-world physical phenomena.
Free and Forced Oscillations
In physics, oscillations describe repetitive motion about an equilibrium position. These motions can occur spontaneously, as in free oscillations, or under continuous external driving, as in forced oscillations. Recognising the type of oscillation allows physicists to predict behaviour such as energy transfer, amplitude change, and frequency stability.
Free Oscillations
Free oscillations occur when a system is displaced from equilibrium and then allowed to oscillate without any continuous external influence. After an initial disturbance, the system’s own restoring forces cause motion that continues until energy losses, such as friction or air resistance, gradually reduce the amplitude.
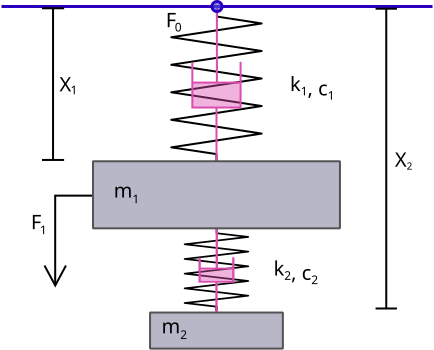
Mass–spring–damper oscillator. The mass mmm is attached to a spring kkk (and, if present, a damper ccc). After release, the restoring force produces free oscillations, while damping causes a gradual decrease in amplitude. (Note: inclusion of the damper visually anticipates energy loss; this is consistent with your text but extends beyond the bare minimum of “free oscillation.”) Source.
Free Oscillation: Oscillation that occurs when a system moves freely under the influence of its own restoring force, without any continuous external driving force.
Typical examples include:
A mass–spring system oscillating after being stretched and released.
A simple pendulum swinging in still air after an initial push.
A tuning fork vibrating after being struck.
In each case, the system’s natural frequency determines how fast it oscillates. The natural frequency depends solely on the system’s physical properties such as mass and stiffness.
Natural Frequency: The frequency at which a system oscillates when displaced and released with no external forces acting upon it.
Once a system is set oscillating freely, its energy alternates between kinetic and potential forms, while the total mechanical energy remains constant in the absence of damping. Over time, damping causes the amplitude to decrease as energy is transferred to the surroundings. However, even as amplitude falls, the period and frequency remain constant, demonstrating the characteristic isochronous nature of simple oscillations.
Forced Oscillations
Forced oscillations occur when an external periodic force continuously drives the system.
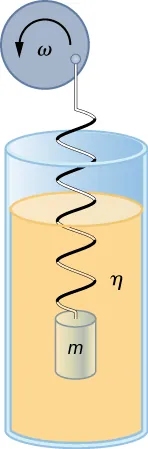
Driven mass–spring apparatus. A motor imposes a periodic displacement/force on the spring, feeding energy each cycle so the system oscillates at the driving frequency. This contrasts with free oscillations, which occur at the system’s natural frequency without continuous external input. (Note: the page also discusses resonance and damping curves elsewhere; those extras are beyond this subsubtopic but the apparatus image itself is directly relevant.) Source.
This external influence supplies energy at regular intervals, maintaining or modifying the motion. Unlike free oscillations, the system no longer vibrates at its natural frequency alone but responds to the frequency of the driving force.
Forced Oscillation: Oscillation that occurs when a periodic external force drives a system, causing it to oscillate at the frequency of the driving force rather than its natural frequency.
Examples include:
A loudspeaker cone vibrating due to an alternating electrical signal.
A child on a swing being pushed regularly to maintain motion.
A bridge deck oscillating due to periodic wind forces or footsteps.
The amplitude of a forced oscillation depends on several factors:
The difference between the driving frequency and the natural frequency.
The strength of the driving force.
The presence and extent of damping within the system.
As energy is supplied by the external driver, the oscillator’s energy input and dissipation reach an equilibrium. When the driving frequency is close to the natural frequency, the system exhibits resonance, leading to a maximum amplitude — though resonance itself belongs to a separate subtopic.
Between each applied push, the restoring force acts, but the external force ensures that the phase relationship between displacement and driving force changes with frequency. At low driving frequencies, the motion follows the driver closely; at high frequencies, the motion lags behind, highlighting the system’s dynamic response.
Comparing Free and Forced Oscillations
Understanding the contrast between these two types of motion is key to analysing mechanical and electrical oscillatory systems.
Key distinctions:
Origin of motion: Free oscillations arise from initial displacement; forced oscillations require a continuous driving force.
Frequency: Free oscillations occur at the natural frequency, while forced oscillations occur at the driving frequency.
Energy source: In free oscillations, the initial energy input sustains motion until it dissipates. In forced oscillations, energy is continually supplied to compensate for losses.
Amplitude behaviour: Free oscillations experience amplitude decay due to damping. Forced oscillations can maintain or even increase amplitude depending on the driving conditions.
Phase relationship: In free oscillations, displacement and acceleration are always out of phase by 180°. In forced oscillations, the phase difference between the driving force and displacement depends on the driving frequency relative to the natural frequency.
Physical Interpretation and Importance
The study of free and forced oscillations underpins many areas of physics and engineering. The concept explains how structures, machines, and electronic circuits behave when subject to time-varying inputs.
In free oscillations, the system behaves predictably and conservatively, with energy oscillating internally. In contrast, forced oscillations represent energy exchange with the surroundings, where the driving force can sustain motion indefinitely.
In practical contexts:
Musical instruments rely on forced oscillations to produce steady sound when driven by air columns or strings.
Buildings and bridges must be designed to avoid excessive motion when subjected to periodic external forces like wind or earthquakes.
Electrical oscillators and resonant circuits operate through forced oscillations controlled by alternating voltage sources.
These distinctions highlight that while free oscillations reveal a system’s inherent characteristics, forced oscillations demonstrate its response to environmental influences. Mastery of both concepts provides a foundation for understanding complex phenomena such as resonance, damping effects, and vibration control.
Quantitative Considerations
Although this section emphasises qualitative understanding, certain relationships support the theoretical basis of forced motion. For a driven oscillator, the steady-state amplitude depends on the balance between driving force, natural frequency, and damping.
EQUATION
—-----------------------------------------------------------------
Angular Frequency (ω) = 2πf
ω = angular frequency (radians per second, rad s⁻¹)
f = frequency of oscillation (hertz, Hz)
—-----------------------------------------------------------------
This equation connects the driving frequency to angular frequency, essential for comparing free and forced oscillations mathematically. A system’s response amplitude varies sharply as ω approaches its natural angular frequency, illustrating the transition between steady forced motion and resonant behaviour.
In conclusion (implicitly within discussion), distinguishing free and forced oscillations enables students to interpret and predict oscillatory systems’ behaviour under both isolated and driven conditions, fulfilling the OCR specification requirement for this subsubtopic.
Practice Questions
Question 1 (2 marks)
Explain the difference between free oscillations and forced oscillations in a physical system.
Mark Scheme:
1 mark for stating that free oscillations occur when a system oscillates under the influence of its own restoring force after an initial disturbance.
1 mark for stating that forced oscillations occur when an external periodic force continuously drives the system.
Question 2 (5 marks)
A student investigates the oscillations of a mass–spring system.
(a) Describe what is meant by free oscillations and forced oscillations.
(b) Discuss how the amplitude and frequency of the oscillations differ between the two types.
(c) Explain, with reference to energy transfer, why damping affects free oscillations differently from forced oscillations.
Mark Scheme:
(a)
1 mark: Free oscillations – motion occurs at the system’s natural frequency after being displaced and released, with no continuous external force.
1 mark: Forced oscillations – motion maintained by an external periodic driving force at the driving frequency.
(b)
1 mark: In free oscillations, amplitude gradually decreases due to energy loss; in forced oscillations, amplitude depends on the driving frequency and force strength.
1 mark: Frequency of free oscillations equals the natural frequency; frequency of forced oscillations equals the driving frequency.
(c)
1 mark: In free oscillations, damping causes energy to dissipate to the surroundings, reducing amplitude over time.
1 mark: In forced oscillations, continuous energy input from the external driver balances energy loss, so amplitude can remain steady.
FAQ
In the absence of damping, the total mechanical energy of the oscillator remains constant.
The energy continuously transfers between kinetic (maximum at the equilibrium position) and potential (maximum at the extremes of motion).
In an ideal system with no resistive forces, amplitude and frequency stay constant indefinitely — however, this is only theoretical, as all real systems experience some form of damping or energy loss.
The phase difference depends on how closely the driving frequency matches the natural frequency of the system.
At low driving frequencies, displacement is nearly in phase with the driving force.
At resonance, the driving force is 90° out of phase with displacement.
At high driving frequencies, displacement is almost in antiphase with the driving force.
This variation reflects the system’s response delay as energy input competes with internal restoring forces and damping.
Yes. Initially, when an external periodic force is applied, the system’s motion is a superposition of:
Transient oscillations at the natural frequency (free component).
Steady-state oscillations at the driving frequency (forced component).
Over time, damping causes the transient (free) motion to die away, leaving only the steady forced oscillation. This explains why in experiments, systems often settle into motion purely at the driving frequency after a few cycles.
Damping determines how much energy is lost per cycle.
With low damping, more energy from the driving force is stored in the system, leading to larger amplitudes near resonance.
With high damping, energy is quickly dissipated, reducing amplitude even when the driving frequency matches the natural frequency.
Thus, damping controls how sharply and strongly a system responds to the external driving frequency.
Engineers apply these concepts to prevent structural failure and optimise performance.
In bridges and buildings, designers identify natural frequencies and use dampers to reduce resonance effects from wind or earthquakes.
In vehicles, suspension systems are tuned to absorb shocks through controlled forced oscillations.
In musical instruments, materials and shapes are chosen so that forced oscillations enhance specific natural frequencies, improving sound quality.
Understanding these behaviours ensures that oscillatory systems remain stable, safe, and efficient in real-world applications.
