
AP Syllabus focus: 'Methods for calculating derivatives of real-valued functions can be extended to vector-valued functions by differentiating each component.'
Vector-valued functions are differentiated component by component, so familiar derivative rules still apply. This lets you analyze change in two or three dimensions without inventing a completely new method.
Understanding the idea
A vector-valued function outputs a vector instead of a single number. In AP Calculus BC, it is often written as in the plane or in space. The parameter controls every component at once.
Because each component is an ordinary real-valued function, the derivative of a vector-valued function is found by differentiating those components separately. This is the main extension from single-variable calculus: the familiar derivative rules do not disappear, but they are applied one coordinate at a time.
Derivative of a vector-valued function: If has component functions that are differentiable at a given value of , then is the vector formed by differentiating each component with respect to .
This means the derivative exists only when every component is differentiable at the same parameter value. If even one component fails to have a derivative, then the entire vector-valued function is not differentiable there.
Componentwise differentiation
If a vector-valued function has three components, the derivative is found exactly as you would expect: take the derivative of the first component, then the second, then the third. Nothing is combined across components before differentiating.
= derivative of the vector-valued function
= derivatives of the component functions
= parameter
This rule works in two dimensions as well, where gives . The structure stays the same no matter how many components are present.
Each component may require a different derivative rule. For example, one component might need the power rule, another the chain rule, and another the derivative of a trigonometric or exponential function. The key idea is that all of those rules are still the ordinary real-valued rules you already know.
Applying familiar derivative rules
When differentiating vector-valued functions, remember the following:
Differentiate each component independently.
Use the appropriate real-valued rule inside each component.
Keep the result in vector form.
A constant component differentiates to .
A constant vector differentiates to the zero vector.
It is important not to treat a vector-valued function as though it were one large scalar expression. The derivative is not a single number unless the original function had only one component. Instead, the derivative is another vector-valued function.
Interpreting notation and meaning
The derivative records the instantaneous rate of change of every coordinate with respect to the parameter.
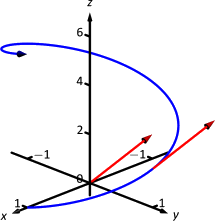
A helix is shown with the derivative vector drawn at a particular parameter value. By placing the same vector at the origin and on the curve, the image emphasizes that is a genuine geometric vector giving the instantaneous direction of motion in 3D, not a single “slope.” Source
In , the first entry tells how fast the -coordinate is changing and the second entry tells how fast the -coordinate is changing.
This is why is a vector rather than a single slope. It describes change in multiple directions at the same time. When , it also gives a tangent direction to the curve traced by the function at that parameter value.
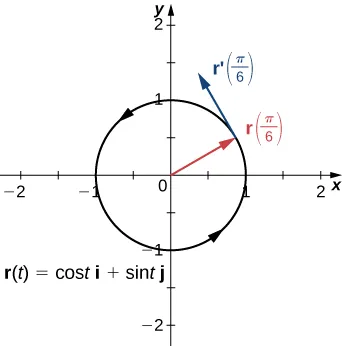
A unit circle is parameterized by , with the position vector (from the origin to the point on the curve) and the derivative vector drawn at that same point. The figure makes the key geometric fact visible: points tangent to the curve, indicating the instantaneous direction of motion as increases. Source
You may also see vector-valued functions written with unit vectors: . Differentiation is still componentwise, so . This notation is completely equivalent to angle-bracket notation.
Higher derivatives
The same idea continues if you differentiate again. A second derivative is found by differentiating each component of , giving . More generally, repeated differentiation is always done component by component.
This matters because once the first derivative has been found, the process does not change. You simply continue applying ordinary derivative rules to the new component functions, as long as those derivatives exist.
Conditions and common pitfalls
A vector-valued function can only be differentiated at values of where all components are defined and differentiable. Its differentiability depends on the shared domain of its components.
Common mistakes include:
Dropping vector notation and writing only separate derivatives without packaging them back into a vector.
Forgetting a derivative rule inside one component, especially the chain rule.
Assuming one differentiable component is enough for the whole derivative to exist.
Mixing up the parameter and the coordinates, especially when the parameter is not named .
Thinking is a slope rather than a vector of rates of change.
Forgetting that a zero in one component does not make the whole derivative zero unless every component is zero.
Careful notation is especially important. If the original function is written as a vector, the derivative should also be written as a vector. That makes the structure of the problem clear and helps avoid component errors.
Practice Questions
Given , find .
Differentiates the first two components correctly to get and only. [1]
Differentiates the third component correctly and writes the full vector . [1]
Let .
(a) Find .
(b) Find .
(c) State the value of for which is undefined.
Part (a): first component differentiated correctly as . [1]
Part (a): second and third components differentiated correctly, giving . [2]
Part (b): second derivative found correctly as . [2]
Part (c): states . [1]
FAQ
$ \mathbf{r}'(t) $ is the derivative of the vector-valued function itself, so it is a vector.
$ |\mathbf{r}(t)|' $ is the derivative of the magnitude of that vector, so it is a scalar.
These are not usually the same thing. A vector can change direction without changing its magnitude, and its magnitude can change even when the vector’s direction stays fixed.
So you should not differentiate the length unless the question specifically asks for the derivative of the magnitude.
Yes.
If two vector-valued functions differ by a constant vector, then their derivatives are the same. This is the vector version of the fact that scalar functions with the same derivative differ by a constant.
For instance, if
$ \mathbf{r}_1'(t)=\mathbf{r}_2'(t) $, then
$ \mathbf{r}_1(t)-\mathbf{r}_2(t)=\mathbf{C} $
where $ \mathbf{C} $ is a constant vector.
This becomes important later when initial conditions are used to identify one specific function.
If the same curve is reparameterised, the derivative vector usually changes.
Suppose $t$ is replaced by a new parameter $u$ with $t=t(u)$. Then the chain rule gives $ \dfrac{d\mathbf{r}}{du}=\dfrac{d\mathbf{r}}{dt}\dfrac{dt}{du} $.
So the derivative depends not only on the curve itself, but also on how quickly the parameter moves along it.
This is why two different parameterisations of the same geometric path can produce different derivative vectors.
Check each component separately at the joining point.
A good method is:
confirm that each component is continuous there
compute the left-hand and right-hand derivatives of each component
compare them
The vector-valued function is differentiable only if every component has matching one-sided derivatives.
If even one component fails this test, the whole vector-valued function is not differentiable at that parameter value.
A sketch can hide small local behaviour.
The derivative may fail to exist because one component has a sharp change, a corner, or a mismatch in one-sided derivatives, even if the overall path appears smooth by eye.
This is especially common with piecewise definitions or graphs drawn without much detail.
So visual smoothness is not enough. Differentiability must be justified from the component functions, not guessed from the picture alone.
