
OCR Specification focus:
‘Energy oscillates between kinetic and potential forms during simple harmonic motion.’
In simple harmonic motion, energy continually transfers between kinetic energy and potential energy, revealing the elegant interplay between motion and restoring forces that defines oscillatory systems.
Energy in Simple Harmonic Motion
In simple harmonic motion (SHM), a system oscillates about an equilibrium position due to a restoring force that is directly proportional to its displacement and acts in the opposite direction. As the oscillator moves, energy is continually exchanged between kinetic energy (KE)—associated with motion—and potential energy (PE)—associated with displacement. The total energy remains constant if there is no damping, meaning energy is merely transferred between these two forms without any loss.
Kinetic Energy in SHM
Kinetic energy represents the energy of motion possessed by an object moving at velocity v. In SHM, velocity varies continuously as the object oscillates, reaching maximum value at the equilibrium position where displacement is zero.
Kinetic Energy: The energy an object possesses due to its motion, calculated as ½mv², where m is mass and v is velocity.
At the equilibrium point, the restoring force and potential energy are both zero, allowing the object to move at its greatest speed and therefore possess maximum kinetic energy. As the object approaches maximum displacement (amplitude), its velocity decreases to zero, and kinetic energy correspondingly falls to zero.
EQUATION
—-----------------------------------------------------------------
Kinetic Energy (Eₖ) = ½mv²
m = mass of the oscillator (kg)
v = instantaneous velocity of the oscillator (m s⁻¹)
—-----------------------------------------------------------------
In simple harmonic motion, velocity varies according to the displacement x from equilibrium:
EQUATION
—-----------------------------------------------------------------
Velocity (v) = ±ω√(A² − x²)
ω = angular frequency (rad s⁻¹)
A = amplitude of oscillation (m)
x = instantaneous displacement from equilibrium (m)
—-----------------------------------------------------------------
By substituting this expression for velocity into the kinetic energy equation, we can express kinetic energy as a function of displacement:
EQUATION
—-----------------------------------------------------------------
Kinetic Energy (Eₖ) = ½mω²(A² − x²)
—-----------------------------------------------------------------
This equation shows that kinetic energy is greatest when displacement is zero and zero when displacement is at its maximum amplitude. The negative sign inside the brackets represents the energy trade-off with potential energy as position changes.
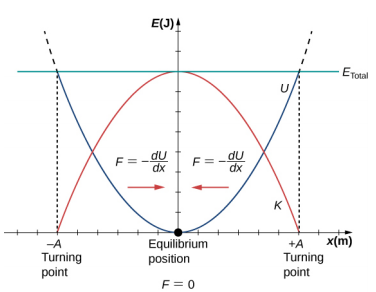
Energy as a function of displacement for SHM: KE (concave-down parabola) peaks at x = 0, PE (concave-up) peaks at x = ±A, and total energy is constant. This visual emphasises where energy resides during the motion for any instantaneous x. Extra detail: small F = −dU/dx arrows indicate the restoring force direction, which is beyond the syllabus requirement but harmless. Source.
Potential Energy in SHM
As an oscillator moves away from equilibrium, the restoring force performs work against the motion, storing energy as potential energy. In the context of SHM, potential energy often takes the form of elastic potential energy in systems such as springs, or gravitational potential energy in pendulums for small angles.
Potential Energy: The stored energy of position in a system due to the work done against a restoring force.
At maximum displacement, all the system’s energy is potential because velocity (and thus kinetic energy) is zero. At the equilibrium position, potential energy is zero because there is no displacement from the natural position.
For a system obeying Hooke’s law, the restoring force is F = −kx, where k is the stiffness constant of the spring.
EQUATION
—-----------------------------------------------------------------
Potential Energy (Eₚ) = ½kx²
k = force constant or stiffness (N m⁻¹)
x = instantaneous displacement from equilibrium (m)
—-----------------------------------------------------------------
Because in SHM the angular frequency ω is related to k and m by ω² = k/m, the potential energy can also be expressed as:
EQUATION
—-----------------------------------------------------------------
Potential Energy (Eₚ) = ½mω²x²
—-----------------------------------------------------------------
This relationship demonstrates that potential energy increases with the square of displacement, meaning energy grows rapidly as the oscillator moves further from equilibrium.
Conservation of Total Energy
In an ideal simple harmonic oscillator with no damping, total mechanical energy remains constant. The sum of kinetic and potential energy at any instant equals the total energy of the system.
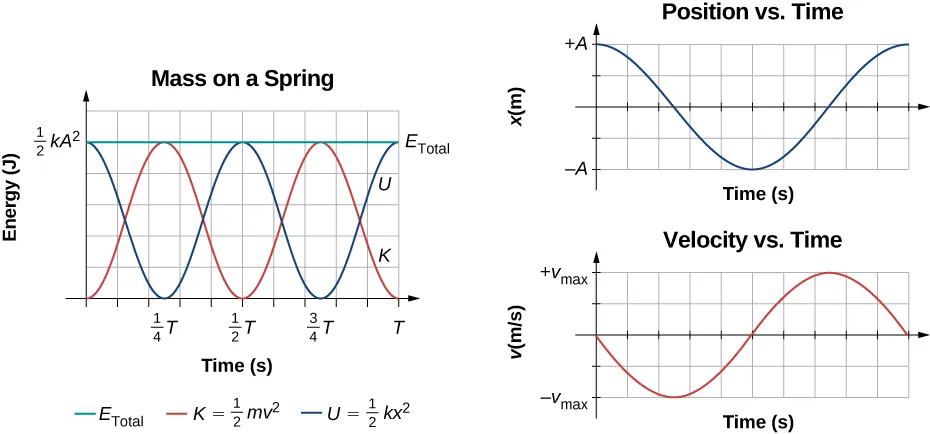
Energy–time plots for a simple harmonic oscillator: the total energy stays constant while kinetic and potential energy exchange sinusoidally with a quarter-period phase difference. The accompanying position–time and velocity–time panels reinforce that maximum KE occurs at x = 0 and maximum PE at x = ±A. Extra detail: position and velocity panels are included, which go slightly beyond the syllabus emphasis on energy. Source.
EQUATION
—-----------------------------------------------------------------
Total Energy (Eₜ) = Eₖ + Eₚ = ½mω²A²
—-----------------------------------------------------------------
This expression highlights that total energy depends only on the amplitude (A) of oscillation and remains unaffected by the instantaneous displacement or velocity. The constancy of total energy is a defining characteristic of undamped SHM and ensures that as one energy form decreases, the other increases by an equal amount.
Energy Interchange and Phase Relationships
The exchange of energy between kinetic and potential forms is perfectly cyclic and occurs with a distinct phase difference of 90° (π/2 radians) between them.
When displacement (x) is zero, velocity (v) is maximum, giving maximum kinetic energy and zero potential energy.
When displacement is at maximum (x = ±A), velocity is zero, giving maximum potential energy and zero kinetic energy.
Between these extremes, energy continuously transfers between the two forms in a smooth sinusoidal manner.
Phase Difference: The angular measure of how much one oscillating quantity leads or lags another, typically measured in degrees or radians.
Because of this phase difference, there is always a continuous exchange rather than abrupt switching of energy types. The total energy, represented by the area under either energy–displacement or energy–time graphs, remains constant for a given oscillator.
Energy Flow in Oscillation Cycles
The periodic transfer of energy can be visualised through the following sequence:
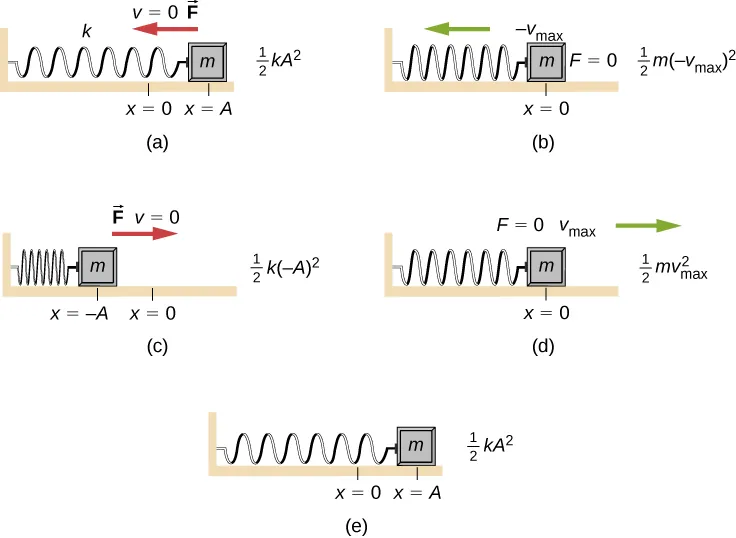
Panel diagram of a mass–spring oscillator showing all PE at x = ±A (v = 0) and all KE at x = 0 (spring unextended). It cleanly depicts how energy trades places as the mass moves between turning points. No extra syllabus-irrelevant content is included beyond concise labels of forces and energies. Source.
At maximum displacement (+A or −A):
Object momentarily stationary.
Kinetic energy = 0.
Potential energy = maximum.
Moving towards equilibrium:
Restoring force does work, converting potential energy into kinetic energy.
Total energy remains constant.
At equilibrium (x = 0):
Velocity and kinetic energy are maximum.
Potential energy = 0.
Moving past equilibrium to opposite displacement:
Kinetic energy converts back into potential energy as speed decreases.
This continual interchange demonstrates that the oscillator does not lose or gain total energy unless damping or external forces act on the system.
Importance of Energy Interchange
Understanding energy interchange is fundamental for describing and analysing oscillatory motion because it underpins the conservation laws governing all mechanical systems. It allows prediction of system behaviour at any point in time and provides a framework for connecting displacement, velocity, and acceleration to measurable energy quantities. This principle also extends beyond mechanical oscillations, applying to electrical and quantum oscillatory systems where energy exchange follows the same cyclic pattern.
Practice Questions
Question 1 (2 marks)
A mass–spring system performs simple harmonic motion. At maximum displacement, the velocity of the mass is zero.
Explain, in terms of energy transfer, what happens to the kinetic and potential energy of the system as the mass moves from maximum displacement towards the equilibrium position.
Mark Scheme:
At maximum displacement, kinetic energy = 0 and potential energy is maximum (1 mark).
As the mass moves towards equilibrium, potential energy is converted into kinetic energy, keeping total energy constant (1 mark).
Question 2 (5 marks)
A 0.50 kg mass oscillates on a horizontal frictionless surface attached to a spring. The amplitude of oscillation is 0.10 m and the angular frequency is 5.0 rad s⁻¹.
(a) Calculate the total energy of the oscillator.
(b) Determine the potential energy of the system when the displacement is 0.06 m.
(c) Explain how the energy of the system changes as it moves from this displacement to the equilibrium position.
Mark Scheme:
(a)
Use E_total = ½mω²A²
E_total = ½ × 0.50 × (5.0)² × (0.10)² = 0.0625 J
• Correct substitution (1 mark)
• Correct answer with unit J (1 mark)
(b)
Use E_p = ½mω²x²
E_p = ½ × 0.50 × (5.0)² × (0.06)² = 0.0225 J
• Correct substitution (1 mark)
• Correct answer with unit J (1 mark)
(c)
• As the mass moves towards equilibrium, potential energy decreases and kinetic energy increases (1 mark).
• Total energy remains constant throughout the motion (1 mark).
FAQ
Energy interchange can be observed using a spring–mass system and motion sensors. A position–time graph reveals displacement, while a velocity–time graph allows calculation of kinetic energy.
By plotting kinetic (½mv²) and potential (½kx²) energy against time or displacement, students can visualise the cyclic conversion between the two forms.
Alternatively, using a data logger to record motion provides accurate timing and velocity measurements, demonstrating that the total mechanical energy remains constant if damping is negligible.
With light damping, energy is lost gradually due to resistive forces such as friction or air resistance.
The total mechanical energy decreases over time.
Both kinetic and potential energy maxima reduce with each cycle.
The energy interchange pattern remains, but amplitudes of the KE and PE curves decay exponentially.
Despite the loss, the system continues to exchange energy between kinetic and potential forms until motion ceases.
The total energy of a simple harmonic oscillator is given by ½mω²A².
While ω (angular frequency) appears in the equation, for a particular system ω is fixed by its mass and stiffness. Therefore, changes in amplitude (A) directly alter total energy because energy is stored through displacement.
Doubling amplitude increases energy by a factor of four since energy is proportional to the square of amplitude. Frequency only affects how quickly this energy is exchanged, not how much there is.
In a spring–mass system, potential energy is elastic, stored in the spring’s extension or compression.
In a pendulum, potential energy is gravitational, stored due to height change of the bob.
At the equilibrium point, both systems have maximum kinetic energy.
At extreme positions, velocity is zero and potential energy (elastic or gravitational) is maximum.
Though the energy forms differ, both systems follow the same conservation principle: total mechanical energy remains constant in ideal SHM.
As the oscillator moves, velocity leads displacement by 90° (π/2 radians).
When displacement is zero, velocity—and therefore kinetic energy—is maximum. When displacement is maximum, velocity is zero, giving maximum potential energy.
This quarter-cycle phase difference ensures smooth energy exchange rather than abrupt transitions. The alternating dominance of kinetic and potential energy reflects the sinusoidal nature of SHM, where energy flows continuously between the two forms.
