
AP Syllabus focus: 'Measurements made in one reference frame can be converted into measurements in another reference frame.'
Converting measurements between frames lets different observers describe the same motion consistently. In AP Physics C Mechanics, this means translating coordinates and velocities by tracking the motion of one frame relative to another.
Reference Frames and Consistent Descriptions
A reference frame is central to this topic.
Reference frame: A coordinate system and time convention used by an observer to assign positions and times to physical events.
Every measurement of motion depends on choices about the origin, the positive direction, and when the clock reads zero. If two observers use different frames, they can still describe the same physical motion, but their numerical measurements may differ. Converting measurements means rewriting one observer’s coordinates so they match another observer’s choices.
The important idea is that the object does not change; only the description changes. A successful conversion compares the same event in both frames: the same object, at the same instant, with carefully matched axis directions.
Converting Position Measurements
Offsets and moving origins
Suppose one frame is moving relative to another along the x-axis.
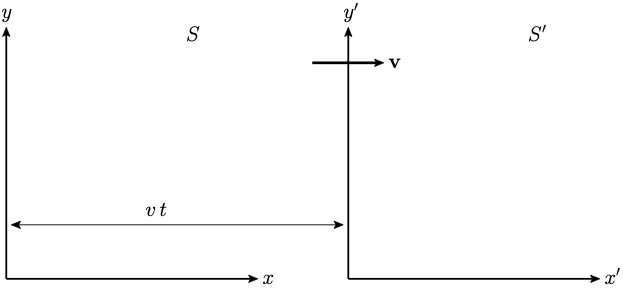
Two inertial frames, and , are drawn with parallel axes while moves to the right at constant speed. After time , the primed origin has shifted by relative to the unprimed origin, which is exactly the geometric offset that motivates (same form as in these notes). The picture emphasizes that the event/object is the same—only the coordinate labels change between frames. Source
If the second frame’s origin moves to the right with constant speed , then its origin changes position over time. To convert the object’s x-coordinate from the original frame to the moving frame, subtract the moving origin’s coordinate from the object’s coordinate.
= position of the object in the moving frame, m
= position of the object in the original frame, m
= velocity of the moving frame relative to the original frame, m/s
= elapsed time after the chosen zero of time, s
This form assumes the two origins coincide at . If they do not, an additional initial position offset must be included before subtracting the frame’s motion. In AP Physics C Mechanics, this is usually handled by reading the diagram carefully and writing the position of one frame’s origin as a function of time.
The sign of matters. If the moving frame travels in the negative x-direction, then is negative, and the same equation still works. This is why a clear sign convention is essential before any algebra begins.
In two or three dimensions, the same idea is applied component by component. If the frames move only along x, then the y- and z-coordinates are unchanged by that relative motion. The conversion affects only the component parallel to the frame motion.
Converting Velocity Measurements
Velocity measurements are also frame-dependent because they describe how position changes in a chosen frame. If the second frame moves at constant velocity relative to the first, the object’s measured velocity in the moving frame is the original velocity minus the frame’s velocity.
= velocity of the object in the moving frame, m/s
= velocity of the object in the original frame, m/s
= velocity of the moving frame relative to the original frame, m/s
This subtraction is easy to misuse if the frame direction is not tracked carefully. The quantity being subtracted is the motion of the frame, not the motion of the object. A positive result means the object still moves in the positive direction of the chosen axis in the new frame. A negative result means it moves in the opposite direction.
For motion in more than one dimension, convert each relevant component separately. If a frame moves only in x, then only the x-component of velocity changes. The perpendicular components keep the same numerical values, provided the axes remain parallel.
A Reliable Conversion Procedure
A dependable method reduces sign errors and mismatched coordinates.
Choose the two frames clearly. Name which frame is the original one and which frame is moving.
Set the axis directions. Both observers should use explicitly stated positive directions.
Identify the relative motion of the frame origins. Write how the moving frame’s origin is positioned relative to the original frame.
Convert the same quantity at the same instant. Do not compare one frame’s position at one time to another frame’s position at a different time.
Apply the conversion to the correct component. Use x-, y-, and z-components separately when needed.
Check the result physically. If the object should appear slower in a frame moving alongside it, the converted value should reflect that expectation.
Common Errors in Frame Conversion
One common mistake is mixing up an object’s coordinate with the coordinate of a frame’s origin. Another is reversing the subtraction and accidentally converting in the wrong direction. A third is ignoring an initial offset between origins, which changes every later coordinate.
Students also lose accuracy by switching sign conventions midway through a problem. If right is chosen as positive in one equation, that choice must remain consistent unless a new coordinate system is explicitly defined. Finally, be careful to distinguish what is measured from what is changing: frame conversion changes the numerical description of motion, not the underlying motion itself.
FAQ
Then you must include a time offset before comparing measurements. A position conversion based only on relative speed is incomplete if one observer’s clock starts later or earlier.
In that case, first relate the times, such as $t' = t - t_0$, and then substitute that adjusted time into the position relation. The physics is unchanged, but the bookkeeping becomes more careful.
These notations are meant to show exactly who is measuring what relative to whom. Different authors choose different conventions to avoid ambiguity.
For example:
one symbol may mean “position of the particle measured in frame B”
another may mean “position of frame B’s origin measured in frame A”
The notation matters less than consistency. Before using any formula, identify what each symbol represents in words.
Not with the same simple formulas used for frames moving at constant velocity along a straight line. A rotating frame changes direction continuously, so its axes are not fixed relative to the other frame.
That means:
the coordinate directions themselves are changing
extra terms can appear in the motion description
direct subtraction of a single constant frame velocity is not enough
For AP Physics C Mechanics, straight-line relative motion is the standard case.
First rewrite one observer’s measurements so both descriptions use a compatible sign convention. If one observer calls east positive and the other calls west positive, every component along that axis changes sign before or during the conversion.
A good habit is to draw both axes clearly. Then decide whether the issue is:
a moving origin
an opposite axis direction
or both at once
Treating these separately helps prevent sign mistakes.
They stop being accurate when speeds become a significant fraction of the speed of light. Then the classical assumptions used in AP Mechanics no longer match nature closely enough.
At very high speeds:
time is not shared in the simple way assumed here
lengths and time intervals depend on the observer
special relativity replaces the classical conversion rules
For ordinary laboratory, vehicle, and projectile speeds, the classical approach is extremely accurate.
Practice Questions
A cart moves to the right at 8.0 m/s relative to the ground. A student stands on a walkway moving to the right at 3.0 m/s relative to the ground. What velocity does the student measure for the cart?
1 mark for using the frame-conversion idea
1 mark for 5.0 m/s to the right
Frame moves to the right at 3.0 m/s relative to frame . The origins coincide at . In frame , a particle has position , where x is in meters and t is in seconds.
(a) Write an expression for the particle’s position in frame .
(b) Determine the particle’s velocity in frame .
(c) Determine the particle’s position in frame at s.
(d) State whether the particle is at rest in frame . Explain briefly.
(a) 1 mark for using
(a) 1 mark for
(b) 1 mark for 5.0 m/s to the right
(c) 1 mark for m
(d) 1 mark for stating the particle is not at rest because changes with time, or equivalently because
