
AP Syllabus focus: 'Observed velocity combines the object's motion with the observer's frame using vector addition or subtraction, while acceleration is the same in all inertial frames.'
Relative motion explains why different observers can report different velocities for the same object, yet still agree on acceleration when their reference frames move at constant velocity relative to one another.
Relative Velocity
Every velocity measurement is made relative to a reference frame. There is no single velocity that all observers must report, because an observer’s own motion affects the measurement. In mechanics, the important task is to state clearly which object is being observed and which frame is doing the observing.
Relative velocity: The velocity of one object as measured in a specified reference frame or by a specified observer.
A useful notation is , read as “the velocity of object relative to observer or frame .” This notation makes the comparison explicit and helps prevent sign errors.
= velocity of object relative to frame ,
= velocity of object relative to frame ,
= velocity of frame relative to frame ,
This is a vector relationship, so direction matters.
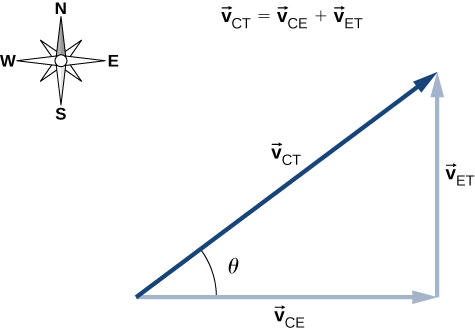
A head-to-tail vector triangle illustrating relative velocity addition: the measured velocity in one frame is obtained by adding the object’s velocity in an intermediate frame to the intermediate frame’s velocity relative to the observer. The right-triangle geometry makes it visually clear why components add independently along each axis. Source
In one dimension, vector addition often appears as algebraic addition or subtraction, depending on the chosen positive direction. In two or three dimensions, the same relationship is applied component by component.
Interpreting Signs and Directions
A negative sign does not mean the formula changed; it means one of the velocities points opposite to the positive direction. That is why relative velocity questions are often easier if you first define a coordinate axis and keep it throughout the problem.
When rearranging the relative velocity equation, the physics stays the same. If you know two of the three velocities, you can solve for the third by vector addition or subtraction. In component form, each axis is treated independently and then recombined only if a magnitude or direction is needed.
Frame Labels Matter
In the notation , the first label names the object whose motion is being described, and the second label names the observer or frame making the measurement. This is more than bookkeeping. A result can look algebraically reasonable and still be physically wrong if the subscripts are inconsistent.
A good self-check is to see whether the intermediate frame appears once in the “object” position and once in the “observer” position when velocities are combined. That pattern reflects how relative measurements connect between frames.
Inertial Frames
An inertial frame is the kind of reference frame in which Newton’s laws hold in their usual form. For this subsubtopic, the key feature is that two inertial frames can move at constant velocity relative to each other. They are not accelerating relative to one another.
Inertial frame: A reference frame that is not accelerating, so an object with no net force moves with constant velocity in that frame.
This idea matters because the special result about acceleration is only guaranteed between inertial frames. If one frame accelerates or rotates, extra apparent effects can enter, and the simple AP Physics C treatment no longer applies directly.
Acceleration in Different Inertial Frames
If frame moves at a constant velocity relative to frame , then the difference between their velocity measurements is itself constant. Taking the time derivative removes that constant difference. As a result, both frames measure the same acceleration for the same object.
= acceleration of object relative to frame ,
= acceleration of object relative to frame ,
This does not mean the velocities are the same. Instead, it means that if two inertial observers compare how the velocity changes with time, they obtain the same result. The constant relative motion between the observers shifts the reported velocity by a fixed amount, but it does not change how quickly that velocity changes.
Why Velocities Differ but Accelerations Agree
The distinction comes from the mathematical relationship between velocity and acceleration:
velocity can change by adding a constant frame velocity
acceleration depends on the rate of change of velocity
the derivative of a constant is zero
So, inertial observers may disagree on whether an object is moving at , , or , but they still agree on whether the object is speeding up, slowing down, or changing direction at a given rate.
Practical Use in Mechanics Problems
Relative velocity is especially important whenever the observer is moving: vehicles, boats, conveyor belts, and aircraft are common contexts. The main skill is to identify the three quantities in the vector equation and keep the frame labels consistent from the start.
Common errors include:
forgetting that velocity is relative, so a frame must be named
mixing up with
treating a vector equation like an unsigned scalar equation
assuming equal velocities in different frames
applying the acceleration result to a frame that is accelerating, which would not be inertial
A strong AP Physics C response clearly states the frame, writes the relative velocity relationship with correct subscripts, and recognizes that acceleration is invariant across inertial frames even though velocity is not.
FAQ
In many AP Mechanics problems, Earth’s rotation and orbital motion produce effects that are much smaller than the main forces and accelerations being studied.
For short time intervals and ordinary laboratory speeds, treating Earth as approximately inertial gives answers that are accurate enough. In very large-scale or high-precision situations, that approximation can break down.
Then the car’s frame is non-inertial, so the simple rule that all observers agree on acceleration no longer applies in the same way.
To make Newton’s laws work inside that frame, you often need to introduce apparent forces, such as a backward “push” felt during forward acceleration. Those forces are not due to a physical interaction in the usual sense; they arise from the accelerating frame itself.
Yes, in classical mechanics they do. If all inertial observers measure the same mass for an object and the same acceleration, then they also agree on the net force through $F=ma$.
What they need not agree on are quantities that depend directly on velocity, such as kinetic energy or momentum. Those change from frame to frame because velocity itself is frame-dependent.
The AP Physics C treatment uses Galilean relativity, which works well when speeds are much smaller than the speed of light $c$.
At speeds close to $c$, space and time are not transformed in the simple classical way. Then velocity transformations come from special relativity rather than ordinary vector addition, and different observers can no longer use the classical formulas without error.
No. Being momentarily at rest does not guarantee that a frame is inertial.
For a frame to be inertial, it must have no acceleration. An object can be stationary at one instant and still be in a non-inertial frame if it is about to speed up, slow down, or turn. For example, the frame of a car stopped at a red light is only inertial if the car remains unaccelerated.
Practice Questions
A student walks east at relative to a train. The train moves east at relative to the ground. What is the student’s velocity relative to the ground?
1 mark: Uses the relative velocity relationship .
1 mark: Correct answer: east.
A small boat has velocity relative to the water. The river has velocity relative to the shore, where is east and is north.
(a) Determine the boat’s velocity relative to the shore in unit-vector form.
(b) Determine the speed and direction of the boat relative to the shore.
(c) At an instant, the boat’s acceleration relative to the water is zero. What acceleration does an observer on the shore measure for the boat? Briefly justify your answer.
1 mark: Writes or applies .
1 mark: Correct unit-vector result: .
1 mark: Correct speed: .
1 mark: Correct direction: north of east or east of north.
1 mark: Correct acceleration statement and justification: because the water frame and shore frame move at constant velocity relative to each other, so inertial observers measure the same acceleration.
