
OCR Specification focus:
‘Solutions include x = A cos(ωt+φ) or x = A sin(ωt); v_max = ωA and v² = ω²(A² − x²).’
The motion of a simple harmonic oscillator can be described precisely using mathematical expressions that link displacement, velocity, and time. Understanding these relationships allows physicists to predict the motion of systems such as pendulums, springs, or molecules vibrating in solids.
The General Solutions for Displacement in SHM
Simple harmonic motion (SHM) can be described by sinusoidal functions that represent how displacement varies with time. Two mathematically equivalent forms are commonly used to express this periodic motion.
EQUATION
—-----------------------------------------------------------------
Displacement (x) = A cos(ωt + φ)
x = displacement from equilibrium (metres, m)
A = amplitude of oscillation (metres, m)
ω = angular frequency (radians per second, rad s⁻¹)
t = time (seconds, s)
φ = phase constant or initial phase (radians, rad)
—-----------------------------------------------------------------
The cosine function represents motion that begins at maximum displacement when t = 0 and φ = 0. However, oscillations can also be described using the sine function, which represents motion starting from equilibrium.
EQUATION
—-----------------------------------------------------------------
Alternative Displacement (x) = A sin(ωt)
x = displacement (m)
A = amplitude (m)
ω = angular frequency (rad s⁻¹)
t = time (s)
—-----------------------------------------------------------------
These two forms are interchangeable depending on the choice of reference point. The inclusion of the phase constant (φ) allows for adjustment of the starting position in the oscillation cycle, ensuring both forms accurately describe any SHM system.
Understanding the Role of Phase
The phase indicates how far through its cycle an oscillator has progressed relative to a reference point. A phase difference of π/2 radians corresponds to a quarter of a cycle, while a difference of π radians represents half a cycle. The phase constant φ determines the oscillator’s initial condition — whether it starts from equilibrium or at maximum displacement.
A cosine form (x = A cos ωt) begins at maximum displacement when t = 0.
A sine form (x = A sin ωt) begins at equilibrium when t = 0.
Therefore, choosing between sine and cosine is a matter of initial conditions, not physical difference in the motion.
Deriving Velocity from Displacement
Velocity in SHM is the rate of change of displacement with respect to time. Differentiating the displacement equation provides a mathematical expression for instantaneous velocity.
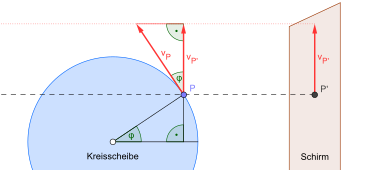
Diagram comparing uniform circular motion with the velocity of its horizontal projection undergoing SHM. The tangential velocity vector maps to the sinusoidal variation v(t)=−Aωsin(ωt+φ), with |v|=ωA at x=0. This geometric link complements the calculus-based derivation in the notes. (Extra detail: the circular construction itself isn’t required by the OCR specification but is a standard, helpful visualisation.) Source.
EQUATION
—-----------------------------------------------------------------
Velocity (v) = −Aω sin(ωt + φ)
v = velocity (metres per second, m s⁻¹)
A = amplitude (m)
ω = angular frequency (rad s⁻¹)
t = time (s)
φ = phase constant (rad)
—-----------------------------------------------------------------
The negative sign indicates that when displacement is at its maximum in the positive direction, velocity is momentarily zero and about to reverse direction. This is consistent with the restoring nature of SHM.
Between the turning points, the oscillator accelerates through equilibrium, where displacement is zero and velocity reaches its maximum value.
EQUATION
—-----------------------------------------------------------------
Maximum Velocity (v_max) = ωA
v_max = maximum speed (m s⁻¹)
ω = angular frequency (rad s⁻¹)
A = amplitude (m)
—-----------------------------------------------------------------
At the equilibrium position (x = 0), the oscillator moves most rapidly. As it moves away from equilibrium, velocity decreases until it becomes zero at the turning points (x = ±A).
Relating Velocity and Displacement
Combining the expressions for displacement and velocity allows for an important relationship between these quantities without explicit reference to time.
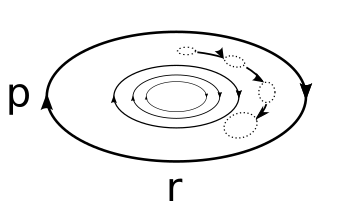
Phase portrait of a simple harmonic oscillator showing closed elliptical orbits in the x–v plane. Each point corresponds to a state (x,v) consistent with v²=ω²(A²−x²). The clean ellipse highlights that |v| is maximum at x=0 and vanishes at x=±A. Source.
EQUATION
—-----------------------------------------------------------------
Velocity–Displacement Relation (v²) = ω²(A² − x²)
v = instantaneous velocity (m s⁻¹)
ω = angular frequency (rad s⁻¹)
A = amplitude (m)
x = displacement (m)
—-----------------------------------------------------------------
This equation shows that velocity depends on displacement: when x = 0, velocity is maximum, and when x = ±A, velocity becomes zero. This reflects the continuous exchange between kinetic and potential energy in SHM, though energy relationships are formally covered in a later topic.
The negative correlation between x and v is crucial for understanding the direction of motion: the oscillator always accelerates back toward equilibrium, opposing displacement.
Phase Relationships Between x and v
The sinusoidal nature of SHM means that displacement and velocity are out of phase by 90° (π/2 radians). This means:
When displacement is zero, velocity is maximum.
When displacement is maximum, velocity is zero.
Graphically, a velocity–time graph appears as a sine wave if displacement is represented by a cosine wave.
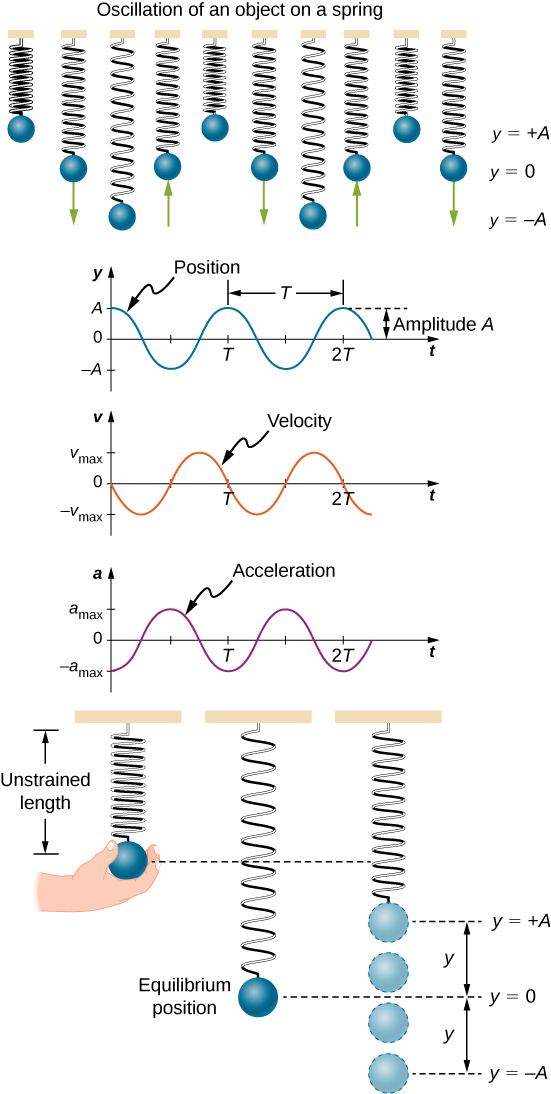
Overlaid graphs of x(t), v(t), and a(t) for a simple harmonic oscillator show that velocity leads/displacement lags by 90° and acceleration is 180° out of phase with displacement. The curves illustrate x=Acos(ωt+φ), v=−Aωsin(ωt+φ), and a=−Aω²cos(ωt+φ). Labels are minimal and aligned with OCR-level expectations. Source.
Connecting the Mathematical Form to Physical Motion
In a spring–mass system or pendulum, the displacement and velocity equations describe how the object oscillates symmetrically about an equilibrium position. The angular frequency (ω) governs how rapidly oscillations occur, while amplitude (A) determines the maximum extent of motion.
Key points to understand:
Displacement follows a sinusoidal path centred on equilibrium.
Velocity is the gradient of displacement and reaches its maximum when displacement crosses zero.
Velocity direction always opposes displacement direction at turning points.
Phase relationships dictate the timing of maximum displacement and velocity events.
These equations are not merely mathematical conveniences; they represent the physical behaviour of real oscillating systems under the influence of a restoring force proportional to displacement.
Measuring Velocity Experimentally in SHM
In practical investigations, the velocity of an oscillator can be determined using:
Motion sensors or data loggers, which record displacement against time and allow velocity to be derived graphically.
Ticker-timers, which mark regular time intervals to track changes in position.
Video analysis, where frame-by-frame measurements produce accurate velocity–time data.
Each of these methods confirms that the measured motion follows the sinusoidal form predicted by the SHM equations.
In all cases, the relationships x = A cos(ωt + φ), v = −Aω sin(ωt + φ), and v² = ω²(A² − x²) are consistent with experimental observation, validating the theoretical description of simple harmonic motion in terms of displacement and velocity.
Practice Questions
Question 1 (2 marks)
A particle moves in simple harmonic motion and its displacement from equilibrium is given by x = 0.06 cos(20t).
(a) State the amplitude of the oscillation. (1 mark)
(b) Determine the maximum velocity of the particle. (1 mark)
Mark scheme:
(a) Amplitude = 0.06 m → 1 mark
(b) Use v_max = ωA → v_max = 20 × 0.06 = 1.2 m s⁻¹ → 1 mark
Question 2 (5 marks)
A mass on a spring performs simple harmonic motion. Its displacement x and velocity v satisfy the relationship v² = ω²(A² − x²).
(a) Explain what happens to the velocity of the mass as it moves from maximum displacement to the equilibrium position. (2 marks)
(b) Using the equation above, show how the velocity varies with displacement and describe the shape of a graph of v against x. (3 marks)
Mark scheme:
(a)
At maximum displacement (x = ±A), velocity is zero because the mass momentarily stops before reversing direction → 1 mark
As it moves towards equilibrium (x = 0), the velocity increases, reaching its maximum value v_max = ωA at x = 0 → 1 mark
(b)
Substitution shows v² = ω²(A² − x²) leads to v = ±ω√(A² − x²) → 1 mark
This is the equation of an ellipse (or semicircle if considering positive v only) in the v–x plane → 1 mark
Graph description: curve symmetric about both axes, v = 0 at x = ±A and v = ±v_max at x = 0 → 1 mark
FAQ
The phase constant (φ) determines the starting position of the oscillator within its cycle at time t = 0.
If φ = 0, the particle starts at maximum displacement. If φ = π/2, it begins at zero displacement but moves towards a maximum. The value of φ depends on initial conditions such as how the oscillator was released or driven.
In practice, φ adjusts the cosine or sine curve horizontally on a time–displacement graph, allowing the mathematical model to match real motion precisely.
Both sine and cosine functions represent identical physical motion; they differ only by a phase shift of π/2 radians.
The cosine form (x = A cos ωt) starts at maximum displacement.
The sine form (x = A sin ωt) starts from equilibrium.
Choosing one over the other simply matches the oscillator’s initial position or the form preferred for algebraic convenience in derivations.
You can derive it by combining the differential equations of SHM.
Start from a = −ω²x and note that a = dv/dt.
Using the chain rule, dv/dt = v(dv/dx).
Therefore, v(dv/dx) = −ω²x.
Integrate both sides with respect to x:
∫v dv = −ω²∫x dx.
This gives ½v² = −½ω²x² + constant.
At x = 0, v = v_max = ωA → constant = ½ω²A². Hence, v² = ω²(A² − x²).
At maximum displacement (x = ±A), the restoring force and acceleration are greatest, but the velocity is zero because the particle changes direction.
As the object moves away from equilibrium, it slows due to the restoring force acting opposite to its motion. The instant before reversal, kinetic energy is momentarily zero and all energy is potential, producing a zero velocity.
For ideal simple harmonic motion, ω remains constant because it depends on system properties, not amplitude or time.
For example:
A spring–mass system has ω = √(k/m).
A simple pendulum (small angles) has ω = √(g/L).
However, in real systems, damping, non-linear forces, or large amplitudes can cause small variations in ω. Such effects take the motion beyond pure SHM, where the defining relationships no longer hold exactly.
