
OCR Specification focus:
‘Define displacement, amplitude, period, frequency, angular frequency and phase difference.’
Simple harmonic motion (SHM) describes oscillations where acceleration is proportional to displacement and directed towards equilibrium. Understanding its key quantities and phase relationships is fundamental to analysing oscillatory systems.
Defining the Fundamental Quantities of SHM
Simple harmonic motion is a foundational concept in physics, characterising systems that oscillate about an equilibrium position under a restoring force proportional to displacement. To describe these oscillations, several quantitative measures are defined precisely.
Displacement
Displacement: The distance and direction of an oscillating particle from its equilibrium position at any instant. It indicates how far and in which direction the particle has moved from rest.
Displacement can be positive or negative depending on the direction relative to equilibrium. It is typically represented by the symbol x, and varies continuously with time as the object oscillates. For SHM, this variation follows a sinusoidal form, such as x = A sin(ωt) or x = A cos(ωt), depending on the initial phase of the motion.
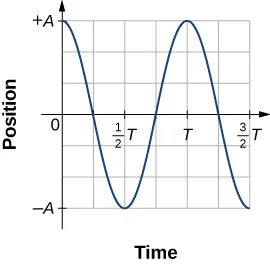
Sinusoidal displacement–time graph for SHM with amplitude A and period T. The curve illustrates how displacement oscillates symmetrically about equilibrium. This visual anchors the definitions of displacement, amplitude, period, and frequency (via f=1/Tf=1/Tf=1/T). Source.
Amplitude
Amplitude (A): The maximum displacement from the equilibrium position during oscillation.
Amplitude measures the extent of oscillation and is always positive. It represents the peak value that displacement reaches. In SHM, amplitude remains constant when no external forces (like damping) act on the system. The amplitude determines the energy of the system, as greater amplitude implies more potential and kinetic energy interconversion during oscillation.
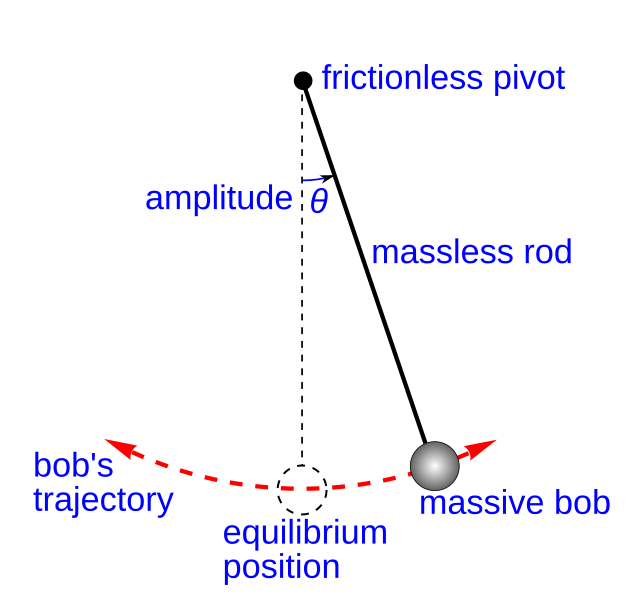
Idealised pendulum illustrating equilibrium and extreme positions. Amplitude corresponds to the maximum angular or arc displacement from equilibrium, while instantaneous displacement may be positive or negative. This schematic includes extra labels (e.g., rod length LLL, angle θ\thetaθ) beyond the syllabus definitions. Source.
Period
Period (T): The time taken for one complete oscillation or cycle, after which the motion repeats itself.
The period depends on the properties of the system, such as mass and restoring force, rather than the amplitude (for an ideal SHM system). For example, a pendulum’s period depends on its length and gravitational acceleration, while a spring-mass system’s period depends on mass and spring constant. The period provides direct insight into how frequently oscillations occur.
Frequency
Frequency (f): The number of complete oscillations made per second.
The SI unit of frequency is the hertz (Hz), equivalent to one oscillation per second. Frequency and period are reciprocals of each other, linked by the relationship f = 1/T. This quantity reveals how rapidly oscillations occur in a given time frame, providing a practical way to measure oscillatory behaviour in laboratory and natural systems.
One must note that the frequency is determined solely by the system’s parameters in simple harmonic motion, making it an intrinsic characteristic of that oscillator.
Angular Frequency
Angular frequency describes how rapidly the oscillating particle moves through its cycle, expressed in radians per second rather than cycles per second.
EQUATION
—-----------------------------------------------------------------
Angular Frequency (ω) = 2πf = 2π/T
ω = Angular frequency (rad s⁻¹)
f = Frequency (Hz)
T = Period (s)
—-----------------------------------------------------------------
The angular frequency allows the motion to be expressed conveniently using trigonometric functions, such as x = A sin(ωt), where ωt represents the angular phase at time t. This formulation is particularly useful in analysing the relationship between displacement, velocity, and acceleration in SHM.
Angular frequency thus provides a direct connection between the temporal and angular descriptions of oscillatory motion, enabling comparisons between oscillations of different physical systems using a unified parameter.
Phase and Phase Difference
In oscillatory systems, phase represents the position and direction of motion of an oscillator at a particular instant relative to a reference point in its cycle. Phase determines how far through its oscillation a particle has progressed.
Phase (φ): The angular measure (in radians or degrees) describing the stage of oscillation relative to a reference.
At φ = 0, the particle is at equilibrium and moving in the positive direction (if using a sine reference). The value of phase changes continuously with time, typically represented as ωt + φ₀, where φ₀ is the initial phase that depends on initial conditions.
Phase Difference
Phase Difference: The angular difference between the phases of two oscillating quantities, showing how one leads or lags the other in its cycle.
Phase difference, measured in radians, indicates the relative timing of oscillations between two points or quantities, such as displacement and velocity. For example, in SHM:
Velocity is π/2 radians (or 90°) out of phase with displacement.
Acceleration is π radians (or 180°) out of phase with displacement.
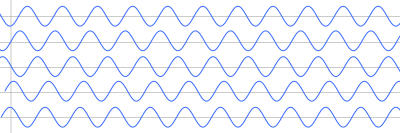
Sine waves of the same frequency with differing phase angles. The horizontal offsets represent phase differences (ϕ\phiϕ) that quantify how one oscillation leads or lags another. This directly supports the definition of phase and phase difference used in SHM. Source.
Understanding phase relationships allows for the precise interpretation of motion graphs and the synchronisation of oscillatory systems in complex phenomena such as waves and resonance.
Conceptual Relationships Among SHM Quantities
In SHM, all these quantities—displacement, amplitude, period, frequency, angular frequency, and phase—are interconnected. Their relationships can be summarised as follows:
Displacement (x) varies sinusoidally with time and is bounded by ±A.
Amplitude (A) defines the scale of the displacement oscillation.
Period (T) and frequency (f) describe how quickly the oscillation repeats.
Angular frequency (ω) connects these temporal measures through the equation ω = 2πf.
Phase (φ) provides the instantaneous state of oscillation, while phase difference explains temporal offsets between oscillations.
These quantities together form the mathematical and physical foundation of simple harmonic motion. By combining them, one can model oscillations precisely and interpret the dynamic interplay between displacement, velocity, and acceleration over time.
The comprehension of these parameters enables physicists to describe a wide range of oscillatory systems—from vibrating atoms and tuning forks to pendulums and electrical circuits—with a consistent analytical framework.
Practice Questions
Question 1 (2 marks)
Define the term amplitude and state how it differs from displacement in simple harmonic motion.
Mark scheme:
1 mark: Amplitude correctly defined as the maximum displacement from the equilibrium position.
1 mark: Displacement correctly described as the distance and direction of the oscillating object from its equilibrium position at a given instant, highlighting that it varies with time while amplitude is constant.
Question 2 (5 marks)
A body executes simple harmonic motion with a frequency of 2.0 Hz and an amplitude of 0.10 m.
(a) Calculate the angular frequency of the motion.
(b) State two quantities that remain constant in this motion and explain why they remain constant for ideal SHM.
(c) Describe the phase difference between displacement and velocity in simple harmonic motion.
Mark scheme:
(a) Angular frequency calculation (2 marks)
1 mark: Correct use of equation ω = 2πf.
1 mark: Correct numerical answer ω = 12.6 rad s⁻¹ (allow 12.57 rad s⁻¹).
(b) Constant quantities explanation (2 marks)
1 mark: States that amplitude and period (or frequency) remain constant.
1 mark: Explains that for ideal SHM there is no energy loss (no damping), so the total energy and system parameters determining frequency remain unchanged.
(c) Phase difference (1 mark)
1 mark: States that velocity leads displacement by 90° (π/2 radians) or that displacement and velocity are out of phase by π/2 radians.
FAQ
The starting point of an oscillation is determined by the initial phase angle (φ₀). It indicates where in its cycle the oscillator begins motion at time t = 0.
If φ₀ = 0, motio n starts from the equilibrium position moving in the positive direction.
If φ₀ = π/2, it starts from maximum positive displacement.
Initial phase depends on how the oscillation is set in motion, for instance by releasing a pendulum from rest at an angle or pushing a spring from equilibrium.
Angular frequency (ω) is preferred because it links time directly with angle in radians, allowing motion to be expressed conveniently in trigonometric form (e.g. x = A sin(ωt)).
Advantages include:
Simplifies differentiation and integration when analysing velocity and acceleration.
Provides a common measure for comparing oscillations and circular motion.
Naturally fits within energy and phase relationships that use radians rather than cycles.
Phase difference can be determined by comparing the time lag between corresponding points (such as peaks or zero crossings) on two displacement–time graphs.
Steps:
Use a data logger or oscilloscope to record both oscillations.
Measure the time difference (Δt) between identical points in the cycle.
Calculate phase difference using the formula φ = 2πΔt / T.
This approach is used in laboratory studies of coupled oscillations or comparing light and sound waves in phase analysis.
In an ideal, undamped system, amplitude is independent of mass and determined solely by how far the system is initially displaced or the energy input given.
However, in real systems with damping or friction, heavier masses may retain amplitude longer because they have more inertia and lose energy more slowly.
Thus, while mass affects frequency and period, it does not directly determine amplitude in theoretical SHM.
These quantities are interrelated through specific phase differences:
Velocity is π/2 radians ahead of displacement.
Acceleration is π radians out of phase with displacement (in the opposite direction).
This means:
When displacement is maximum, velocity is zero.
When displacement passes through zero, velocity is maximum.
Acceleration is greatest when displacement is greatest, always directed toward equilibrium.
These phase shifts explain the smooth energy exchange between kinetic and potential energy during oscillation.
