
AP Syllabus focus: 'Motion in two or three dimensions can be analyzed by separating it into components and applying one-dimensional kinematic relationships.'
Many mechanics problems appear complicated because motion is not confined to a straight line. The standard AP Physics C approach is to split the motion into perpendicular directions and solve each direction with familiar one-dimensional kinematics.
Why break motion into components
An object moving in two or three dimensions still has a single position vector, velocity vector, and acceleration vector. However, each of these vectors can be separated into parts along chosen coordinate axes. This process turns one multidimensional problem into several simpler one-dimensional descriptions.
Component: The signed projection of a vector along a chosen axis. A component tells how much of the vector points in one coordinate direction.
Once axes are chosen, the motion along the -, -, and, if needed, -directions can be treated separately.
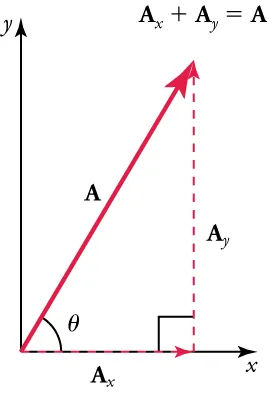
A vector is shown as the hypotenuse of a right triangle whose legs are its perpendicular components and . The diagram visually encodes the idea that the original vector can be written as the sum of its component vectors, , which is the geometric basis for component-based kinematics. Source
Each component behaves like a scalar quantity with a sign, so the algebra is the same type used in straight-line motion. This is the main simplification in multidimensional kinematics.
A key idea is that the components are all tied to the same time variable. The object does not undergo separate motions with separate clocks. Instead, , , and describe different aspects of the same motion at the same instant.
Choosing coordinates
The coordinate system is a mathematical tool, not a physical feature of the motion. Any set of perpendicular axes can work, but some choices make the analysis much easier. In practice, it is often best to align axes with the geometry of the problem or with a known direction of acceleration. Whatever axes are chosen, keep them fixed and use the same sign convention throughout the problem.
Writing vectors in component form
In two dimensions, vectors are usually written using and components. In three dimensions, a component is added. Component form is useful because it separates direction information into independent coordinate pieces.
= position vector, m
= coordinates along the chosen axes, m
= velocity vector, m/s
= velocity components, m/s
= acceleration vector, m/s²
= acceleration components, m/s²
If a vector is given by a magnitude and an angle, its components are usually found with trigonometry.
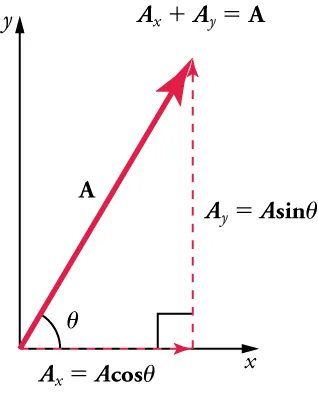
This diagram ties the geometry of a right triangle to the standard component formulas for a vector of magnitude at angle . It explicitly labels and , reinforcing that components are projections onto the coordinate axes (with signs determined by direction). Source
For a vector of magnitude at angle measured from the positive -axis, the usual relations are and . In three dimensions, additional geometric information is needed to determine the third component.
Signs must always reflect direction. A negative component does not mean the vector itself is negative; it means that part of the vector points opposite the positive axis. Many errors in multidimensional kinematics come from incorrect signs rather than incorrect physics.
Applying one-dimensional kinematics to each axis
After resolving vectors into components, apply the standard one-dimensional kinematic relationships to each coordinate direction.
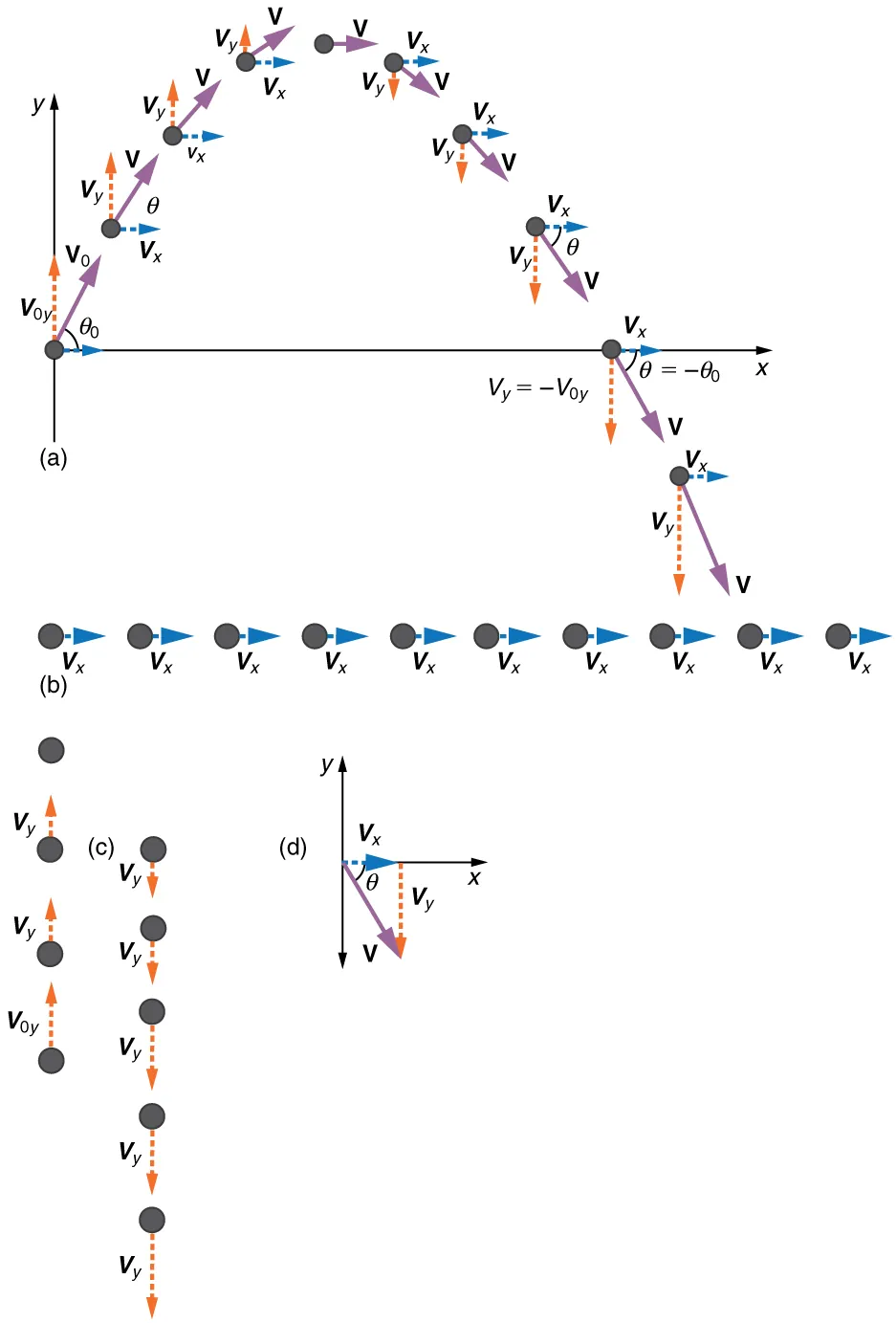
A projectile’s motion is depicted as the superposition of independent horizontal and vertical motions, with velocity components labeled at several points along the trajectory. The subpanels highlight that the horizontal component can remain constant while the vertical component changes due to constant acceleration, and the full velocity is obtained by recombining components at the same instant. Source
If acceleration is constant, each axis has its own position and velocity equations.
= position coordinate along the -axis, m
= initial -coordinate, m
= initial -component of velocity, m/s
= -component of acceleration, m/s²
= elapsed time, s
= corresponding quantities along the -axis
= corresponding quantities along the -axis
The same separation works for velocity components. For constant acceleration, , , and . Each equation is one-dimensional, even though the object’s overall motion is not.
This method keeps the mathematics organized. Instead of solving one complicated vector problem all at once, you solve several smaller scalar problems. The shared time variable connects them, and together they describe the full motion.
If the full speed is needed after solving the components, combine them at the same instant. In two dimensions, , and in three dimensions, . The component method therefore handles both the separate coordinate behavior and the final overall motion.
Practical method
Choose axes that simplify the geometry.
Resolve known vectors into components before substituting into equations.
Write separate kinematic equations for each coordinate direction.
Use the same time in every component equation.
Solve for the needed component quantities first.
Recombine components only if necessary to recover an overall vector or magnitude.
Common pitfalls
Confusing the full vector with one of its components.
Using total speed when a component such as or is required.
Choosing the wrong trigonometric function because the angle is measured from an unexpected axis.
Dropping negative signs for components that point opposite the positive direction.
Treating different axes as if they had different elapsed times.
FAQ
Use the angle exactly as it is drawn. The component along the axis that touches the angle is the cosine component, and the component opposite the angle is the sine component.
So, if an angle $\phi$ is measured from the positive $y$-axis, then typically $A_y=A\cos\phi$ and $A_x=A\sin\phi$, before assigning signs from the diagram.
It is helpful when the motion has a natural direction, such as along a sloped track or along a line of known acceleration. Rotating the axes can reduce the amount of trigonometry.
The physics does not change when you rotate axes. What changes is only the component description, so any consistent axis choice is acceptable.
Components depend on the coordinate system, but the actual vector does not. Different axes produce different numbers for the components, yet they still represent the same motion.
If both students analyse the motion correctly and convert back to the same physical quantities, their final answers will agree.
Treat each coordinate direction separately. If the object moves from $(x_1,y_1,z_1)$ to $(x_2,y_2,z_2)$, the displacement components are $\Delta x=x_2-x_1$, $\Delta y=y_2-y_1$, and $\Delta z=z_2-z_1$.
From there, apply the relevant one-dimensional relation to each axis. Three-dimensional analysis is usually just the two-dimensional method with one extra component.
Keep the motion in parametric form if needed. In many problems, the cleanest approach is to solve for time from the simplest component and then substitute into the others.
If that is not possible, use simultaneous equations or leave the answer as $x(t)$ and $y(t)$. A parametric description is still a complete description of the motion.
Practice Questions
A particle has an initial velocity of magnitude m/s at an angle of above the positive -axis. Determine and .
1 mark for using and
1 mark for m/s and m/s
An object moves in the -plane with constant acceleration. At , m, m, m/s, m/s, , and m/s².
(a) Write expressions for and .
(b) Find and at s.
(c) State why this motion can be analyzed using two one-dimensional kinematic descriptions.
1 mark for
1 mark for
1 mark for m/s at s
1 mark for m/s at s
1 mark for stating that the motion is split into perpendicular components, with each component following its own 1D kinematic relation using the same time
