
AP Syllabus focus: ‘Translational equilibrium occurs when the net force on a system is zero.’
Translational equilibrium is the starting point for analyzing objects that do not speed up, slow down, or change their straight-line motion. It connects free-body diagrams to solvable algebraic conditions in one or more dimensions.
What translational equilibrium means
In translational equilibrium, the net external force on the chosen object or system is zero. This is a statement about translation (linear motion), not rotation.
Translational equilibrium — the condition in which the vector sum of all external forces on a system is zero, so the system’s center-of-mass acceleration is zero.
A system in translational equilibrium may be at rest or may move with constant velocity; the key requirement is zero acceleration of the center of mass.
The mathematical condition: net force equals zero
To apply translational equilibrium, represent each interaction with an external force on a free-body diagram, choose axes, and write component equations that enforce a zero vector sum.
= vector sum of all external forces on the system, in newtons (N)
= sum of force components along the chosen -axis, in N
= sum of force components along the chosen -axis, in N
These component equations are the usual algebraic form used on the AP Physics 1 exam, because most forces are easiest to add after resolving them into perpendicular directions.
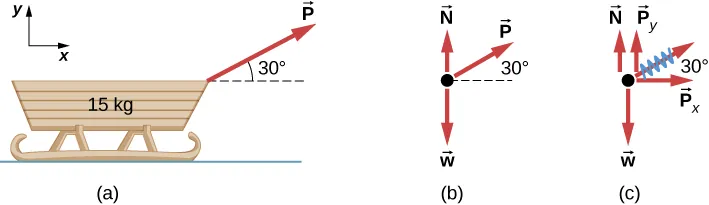
A sled is pulled by a force at an angle, shown first as a basic free-body diagram and then as a component diagram where the applied force is replaced by and . This visually motivates why equilibrium is typically written with separate component equations (e.g., and ) after choosing axes. Source
How to set up equilibrium force equations
1) Choose the system and identify external forces
Decide what object(s) are included in the system.
Include only forces exerted by the environment on that system.
If multiple objects are treated as one system, forces between objects inside the system are internal and do not appear on the system’s free-body diagram.
2) Choose axes that reduce algebra
Align an axis with likely motion or with a surface (common choice: one axis along a ramp, one perpendicular).
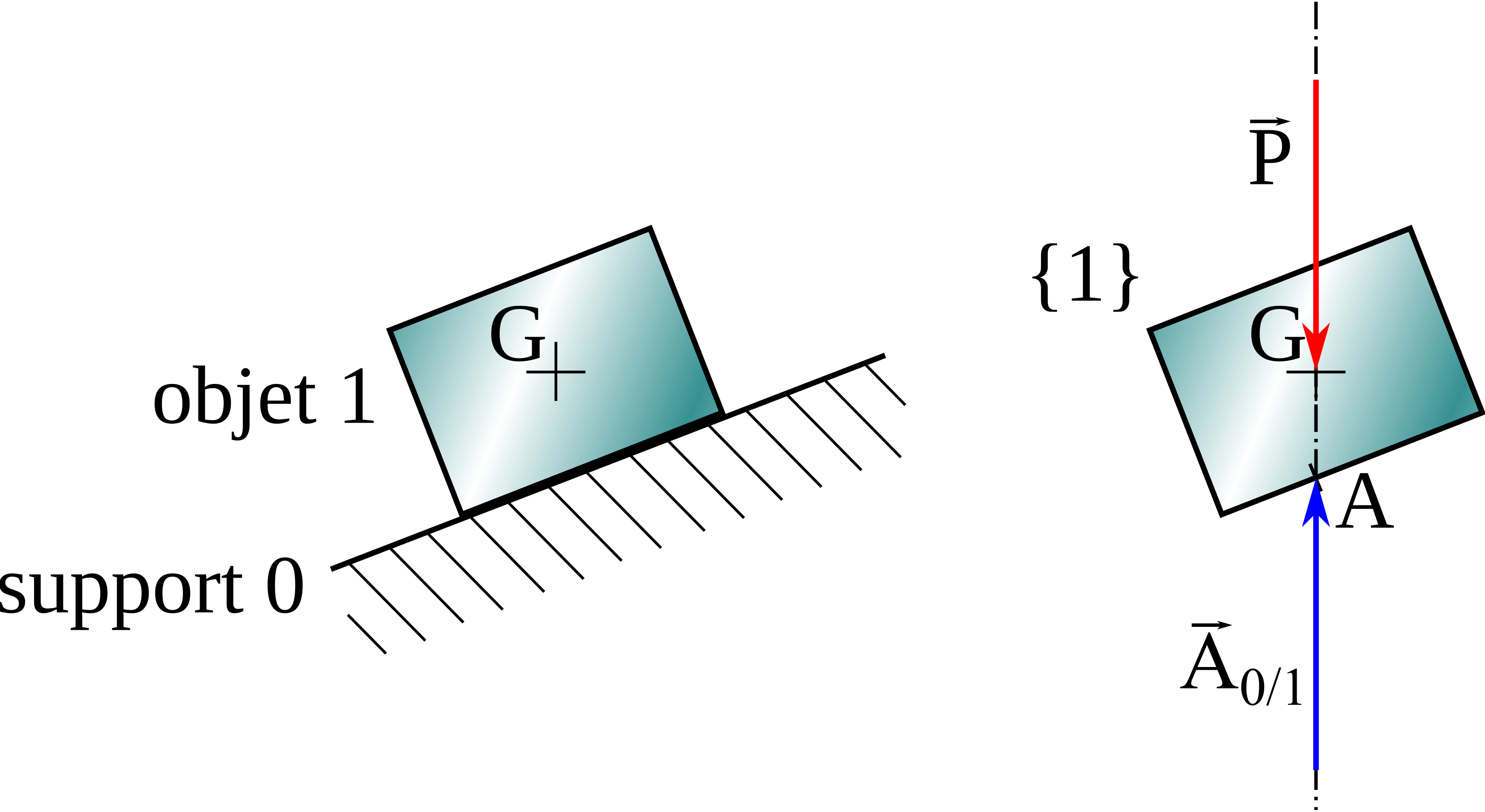
Free-body diagram of an object on an inclined plane in static equilibrium, with the key contact and body forces labeled. It supports the common AP setup of choosing axes parallel/perpendicular to the incline so the equilibrium conditions can be written as two independent component equations. Source
Use clear sign conventions (for example, right/up positive).
3) Write equilibrium in each independent direction
In 1D equilibrium: write a single equation (for example, ).
In 2D equilibrium: write two independent equations, typically and .
Each force must be included with the correct sign and, if needed, expressed via components (using sine/cosine based on the angle definition in the diagram).
Interpreting what the equations are telling you
Balanced vs. unbalanced forces
“Balanced” means the vector sum is zero, not that forces are equal in magnitude. Two unequal forces can still balance if there are additional forces, or if components cancel in different directions.
What can be solved using translational equilibrium
Unknown force magnitudes (for example, support forces or tensions) when the object is not accelerating.
Relationships among forces when an object maintains constant velocity.
Whether a proposed set of forces is physically consistent (if or cannot equal zero).
Common mistakes to avoid
Treating equilibrium as “no forces act”; in equilibrium, forces can be large but must cancel as vectors.
Mixing up angle reference: decide whether the given angle is measured from the horizontal or vertical before writing components.
Forgetting that each equation is directional: satisfying does not automatically satisfy .
Including internal forces when the system contains multiple interacting objects.
Practice Questions
(2 marks) A book rests on a level table. Identify the vertical forces on the book and state the translational equilibrium equation in the vertical direction.
1 mark: Correctly identifies weight downward and normal reaction upward.
1 mark: Writes leading to (or equivalent).
(5 marks) A sign is held at rest by two cables that meet at the sign. Cable A makes to the horizontal (upwards to the left) and cable B makes to the horizontal (upwards to the right). Find the tensions and .
1 mark: Uses translational equilibrium with two component equations: and .
1 mark: Correct components for each cable (e.g., horizontal: left, right; vertical: , up).
1 mark: Correct horizontal equation, e.g. .
1 mark: Correct vertical equation, e.g. .
1 mark: Solves consistently to obtain and (allow sensible rounding).
FAQ
Yes. Translational equilibrium requires $ \sum \vec{F}=\vec{0} $, so acceleration is zero.
That allows constant velocity (including constant speed in a straight line), not only rest.
In equilibrium, each independent direction must have zero net force.
In 2D, forces can be unbalanced in $x$ even if they balance in $y$, so you need both $ \sum F_x=0 $ and $ \sum F_y=0 $.
Changing the system can remove internal forces from the free-body diagram.
For example, if two connected objects are treated as one system, the interaction force between them is internal and is not included in $ \sum \vec{F} $.
No. Translational equilibrium only sets net force to zero.
To rule out rotation for an extended object, you would also need the net torque to be zero (a separate condition).
First decide which axis the angle is measured from.
Then choose components so the force triangle matches your diagram:
If angle is from horizontal: use $F_x=F\cos\theta$, $F_y=F\sin\theta$.
If angle is from vertical: swap sine/cosine accordingly.
