
AP Syllabus focus: 'Once velocity is found, calculus and initial conditions can be used to determine the object's acceleration and position as functions of time.'
When a velocity function is known, it becomes the main connection between motion quantities. Calculus lets you convert that single function into full descriptions of an object's acceleration and position.
Velocity as the central motion function
In one-dimensional mechanics, velocity often provides the most useful starting point because it links the two other key kinematic quantities. The acceleration function tells how rapidly velocity changes, while the position function tells where the object is at each instant. If is already known from a model or previous derivation, the remaining task is mathematical: use differentiation to obtain acceleration and use integration to obtain position.
To complete that task, you also need information about the state of the motion at a particular time. Without that extra information, integration produces a family of possible position functions rather than a single physical answer.
Initial conditions: Known values of motion variables at a specific time, used to determine the constants that appear in a solution.
Initial conditions usually appear as statements such as , , or a known value of velocity at a reference time. In this subsubtopic, they are especially important when finding position, because integration introduces an arbitrary constant.
Finding acceleration from velocity
Acceleration is obtained from the time derivative of velocity.
This step answers the question, "How quickly is the velocity function changing at each moment?" If the slope of the velocity-time graph is positive, acceleration is positive.
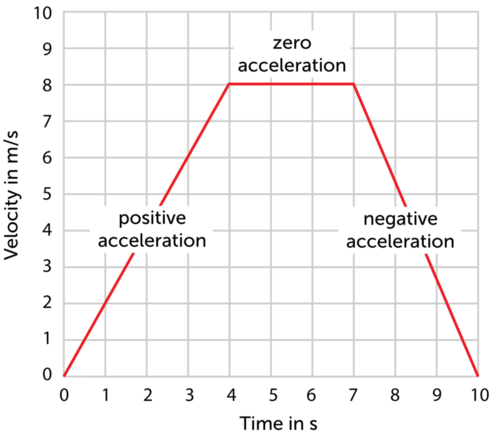
A velocity–time graph with distinct rising, flat, and falling segments that visually encode acceleration as slope. The steeper the line, the larger the magnitude of at that time, while a horizontal segment corresponds to . Source
If the slope is negative, acceleration is negative. If the velocity function is constant, its derivative is zero, so the acceleration is zero.
= acceleration along the chosen axis, m/s²
= velocity along the chosen axis, m/s
= time, s
When taking this derivative, keep the sign of separate from the sign of . A particle can have positive velocity and negative acceleration, or negative velocity and positive acceleration. Velocity describes direction of motion; acceleration describes how the velocity is changing. This distinction becomes important when analyzing whether the object is speeding up, slowing down, or changing direction.
Finding position from velocity
Position is obtained from the time integral of velocity. Because velocity is the rate of change of position, integrating velocity reverses that process. Mathematically, this produces position as a function of time, but physically it also shows that the area under a velocity-time graph over an interval gives the change in position during that interval.
= position at time , m
= position at the reference time , m
= velocity as a function of time, m/s
= time at which position is evaluated, s
This definite-integral form is especially useful because it builds the initial condition directly into the formula. If you instead use an indefinite integral, you would write , where must then be found from a known position value. Both approaches are equivalent when used correctly.
Using initial conditions correctly
A position function is not complete until the constant or reference value is fixed. In AP Physics C, this usually means substituting a known time and position after integrating.
Choose the reference time carefully, often unless the problem states otherwise.
Substitute the known position condition exactly as given, such as or .
Solve for the integration constant or use the definite-integral form to avoid a separate constant.
Check that the final position function has units of meters and satisfies the stated condition.
A common mistake is to confuse displacement with position. The integral of velocity over an interval gives change in position, written as , not automatically the absolute position unless a reference position is included.
Interpreting results physically
Once you have and , the three functions , , and should form a consistent set. The derivative of position should recover velocity, and the derivative of velocity should recover acceleration. This gives a powerful self-check, especially on free-response questions where algebraic errors can easily enter during integration or differentiation.
You should also connect the functions to motion behavior:
If , the object moves in the positive coordinate direction.
If , the object moves in the negative coordinate direction.
If has the same sign as , the speed increases.
If has the opposite sign from , the speed decreases.
Zeros of are especially important. They can indicate moments when the object is instantaneously at rest. However, a zero velocity does not always mean the motion reverses; the sign of velocity on each side of that time determines whether a true change of direction occurs. Similarly, a zero of does not mean velocity is zero; it only means the velocity function has a horizontal tangent there.
In many problems, the final algebraic form of may look more complicated than the form of because integration introduces additional constants or different function types. That is normal. The essential requirement is that differentiating your position function gives back the original velocity function exactly.
FAQ
A definite integral automatically includes the reference time and reference position, so it reduces the chance of losing or mishandling the constant of integration.
It is especially helpful when the known position is given at a time other than $t=0$, because you can write the answer directly in terms of that stated condition.
Then any acceleration or position found from it is only valid on that same time interval.
If the problem changes its force model, constraint, or physical conditions later, you may need a piecewise position function:
use one expression on the first interval
use a new one on the next interval
match the position continuously at the boundary time
Yes. If two position functions differ only by a constant, they produce the same derivative and therefore the same velocity.
That constant represents a different choice of origin, not a different physical pattern of motion. The object moves the same way relative to time, but all positions are shifted by the same fixed amount.
A turning point requires a sign change in $v(t)$.
If $v(t)$ changes from positive to negative, the particle reverses from the positive direction to the negative direction. If $v(t)$ changes from negative to positive, the reverse happens. If $v(t)=0$ at one instant but has the same sign on both sides, the particle only pauses momentarily and does not turn round.
It means the acceleration is not defined at that instant in the usual calculus sense.
In practice, this often signals:
an idealised sudden change in the model
a piecewise-defined velocity function
a physical approximation rather than a perfectly smooth motion
You can still analyse the motion by finding the left-hand and right-hand derivatives, or by treating the motion separately on each side of the non-differentiable point.
Practice Questions
A particle moves along the -axis with velocity for .
(a) Determine the acceleration function.
(b) Find the acceleration at s.
1 mark for differentiating velocity correctly: m/s²
1 mark for evaluating at s: m/s²
A particle moves along the -axis with velocity for . At , the particle is at m.
(a) Find an expression for the acceleration as a function of time.
(b) Determine the position function .
(c) Find the position at s.
1 mark for correct differentiation:
2 marks for correct integration of velocity: or any equivalent antiderivative
1 mark for applying the initial condition to find , giving
1 mark for correct evaluation at : m
