
AP Syllabus focus: ‘Objects within a system may behave differently, and changing external variables can change the system’s substructure.’
Modeling in physics depends on what details matter. Many real systems have parts that respond differently, and the “right” system model can change as external conditions change during motion.
Internal structure: when “one object” is not enough
A system can contain multiple objects or multiple parts of one object. The internal structure is the set of components and constraints (contacts, links, couplings) that determine how those parts move relative to each other.
When internal structure matters, treating everything as a single object can hide important behavior:
Different parts can have different accelerations (non-rigid behavior).
Parts can store or release energy internally (deformation, compression).
Connections can transmit forces imperfectly or fail.
A practical goal is to choose the simplest model that still matches the observed motion.
Subsystems and why we redefine them
Often you analyze a complex system by dividing it into subsystems whose interactions you track explicitly.
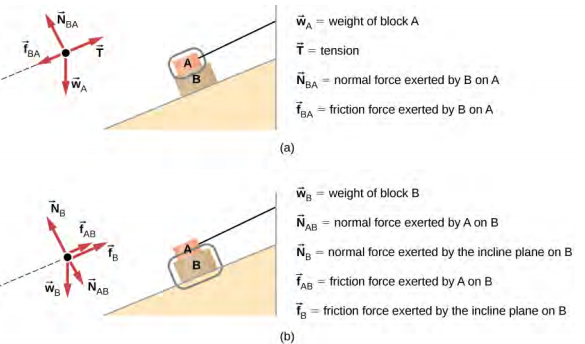
Two free-body diagrams for a two-block system on an incline, isolating block A and block B separately. The contact forces (normal and friction) appear as external forces on each isolated subsystem, making the across-boundary interactions explicit. This helps students see how subsystem boundaries control which forces show up in each diagram. Source
Subsystem: a chosen part of a larger system treated as its own “object” for analysis, with interactions across its boundary represented as external forces on that subsystem.
Subsystem choices are not unique. You pick boundaries to make the physics transparent:
Separate parts when they can move differently.
Combine parts when they move together in a predictable way.
Redraw subsystem boundaries if the physical connections or constraints change.
How external variables can change substructure
The syllabus emphasis is that changing external variables can change the system’s substructure. Here, “external variables” means conditions imposed by the environment, such as:
The magnitude or direction of an applied push/pull
The angle or motion of a supporting surface
The speed of the system through a medium
Whether a constraint is present (a barrier, latch, or guide)
These changes can alter which components effectively act together.
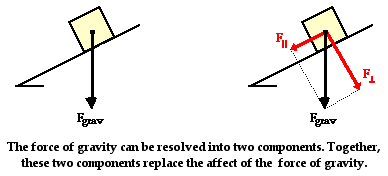
An object on an incline with the weight vector decomposed into components parallel and perpendicular to the surface. This visual reinforces why a change in an external variable (the incline angle) changes the force components you use, while the normal force remains perpendicular to the surface. It supports setting up Newton’s 2nd law along axes aligned with the surface. Source
Common substructure changes to watch for
Contact begins or ends: an object lifts off, collides, or loses contact with a surface.
Coupling switches state: parts that were “locked together” begin to slip, separate, or hinge.
Constraint activates/deactivates: a rope goes taut after slack, a stop is reached, or a latch engages/disengages.
Internal deformation becomes relevant: a “rigid” approximation fails when bending or compression affects motion.
In each case, the system is the same physical collection of matter, but your model’s internal connections (and therefore the best subsystem breakdown) changes.
What changes in your diagrams and equations
When the internal structure changes, your analysis must update in three coordinated ways.
1) Update the object list and boundaries
If two parts move together: you may combine them into one subsystem.
If they begin moving differently: split into separate subsystems.
If a connector breaks or releases: remove that interaction from the model after the change.
2) Reclassify forces as internal vs across-boundary
Forces between parts inside the chosen system boundary are internal; forces from outside are external to that system (or subsystem). If you redraw subsystem boundaries, some forces change category:
A contact force between two blocks is internal to the two-block system
The same contact force is external to either block subsystem
3) Rebuild the interaction representation
When substructure changes, the set of interactions changes:
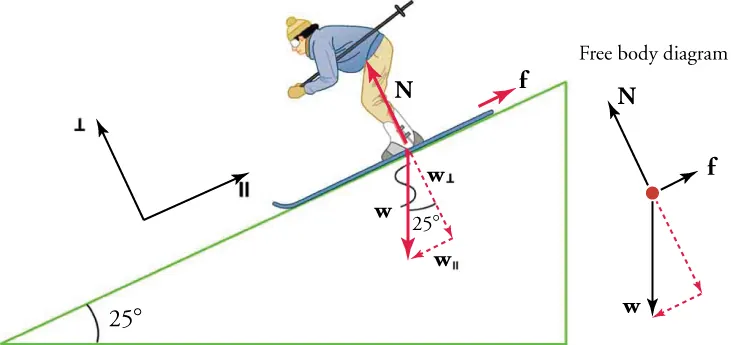
A free-body diagram for motion on an inclined surface, labeling the normal force , friction , and weight . The figure emphasizes that the relevant force components depend on the chosen axes (parallel/perpendicular to the incline), which is a common reason students must rebuild equations when conditions change. It also highlights which interactions are present (contact and friction) versus absent. Source
A lost contact means a contact interaction is removed.
A newly engaged constraint means a new interaction is added.
A “together” model may replace multiple interaction forces with a single effective external influence on the combined subsystem.
Careful language helps: you are not changing the physics, you are changing which interactions you treat as inside the model versus imposed from the environment.
Signs your subsystem model must change
Look for these indicators:
One part’s motion stops matching another part’s motion (relative slipping, separation, or rotation).
A connector reaches a limit (fully stretched, fully compressed, or hits a stop).
The environment condition changes abruptly (surface ends, support angle changes, external agent lets go).
Predictions become inconsistent (a required internal force would exceed what the connection can provide).
Practice Questions
(2 marks) A device consists of two components held together by a latch. For small applied pulls, the components move together; for larger pulls, the latch releases and the components move separately. Explain, in terms of system modelling, what changes when the pull increases.
1 mark: States that the internal structure/constraint (latch) changes state (engaged to released).
1 mark: Explains that the appropriate model changes from one combined system (moving together) to two subsystems (moving independently), so interactions/forces must be re-identified.
(5 marks) Two identical carts are initially connected and move together on a straight track when pulled. The pulling force is increased until the connector fails. Describe how you would model the motion before and after failure using subsystems and force interactions. Your answer should reference internal structure and changing external variables.
1 mark: Identifies the applied pull as an external variable that is changed.
1 mark: Before failure: models carts as a single system or two coupled subsystems with a functioning internal connection.
1 mark: Notes the connector force is an internal interaction (if the two-carts system is chosen) but external to each cart if treated separately.
1 mark: At/after failure: internal structure changes (connection removed), requiring a new subsystem breakdown (two independent carts).
1 mark: States that force interactions/diagrams must be updated to remove the connector interaction and represent only remaining environment forces on each cart.
FAQ
Track positions of multiple points on the system.
If separations between points stay constant (within uncertainty), treating parts as one subsystem is supported.
The physical objects may be unchanged, but constraints can engage/disengage.
Your model changes when you redraw boundaries or add/remove interactions to match the new constraint situation.
Yes. If bending/compression affects motion, internal degrees of freedom become relevant.
You may need to split a “single object” into interacting parts to capture the behaviour.
Pick boundaries that make the possible change explicit.
For instance, keep the connector interaction visible so you can remove it immediately once failure occurs.
Because external conditions can activate new constraints or remove old ones.
A single run can include phases (contact/no contact, coupled/uncoupled) needing different subsystem models.
